
 FREE DELIVERY FOR ORDERS ABOVE $100 ALL AROUND SINGAPORE!
FREE DELIVERY FOR ORDERS ABOVE $100 ALL AROUND SINGAPORE!
PRODUCTS

47:1 Metal Gearmotor 25Dx67L mm LP 12V with 48 CPR Encoder
MODEL: 4885
(per piece)
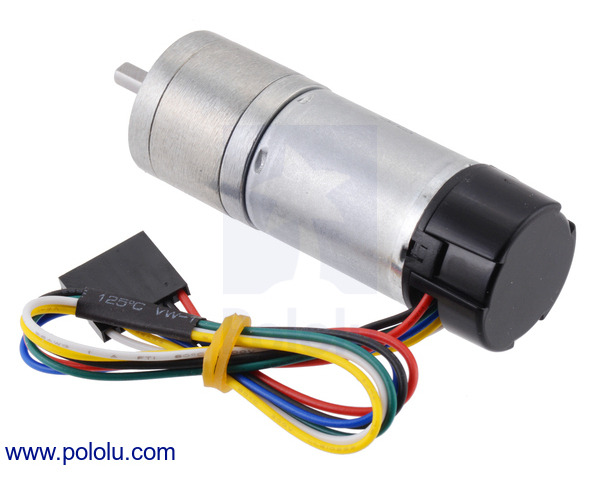

This gearmotor consists of a low-power, 12 V brushed DC motor combined with a 46.85:1 metal spur gearbox, and it has an integrated 48 CPR quadrature encoder on the motor shaft, which provides 2248.86 counts per revolution of the gearbox’s output shaft. The gearmotor is cylindrical, with a diameter just under 25 mm, and the D-shaped output shaft is 4 mm in diameter and extends 12.5 mm from the face plate of the gearbox.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 120 RPM, 60 mA | 4.8 kg⋅cm (67 oz⋅in), 0.9 A |
Details for item #4885
Exact gear ratio:
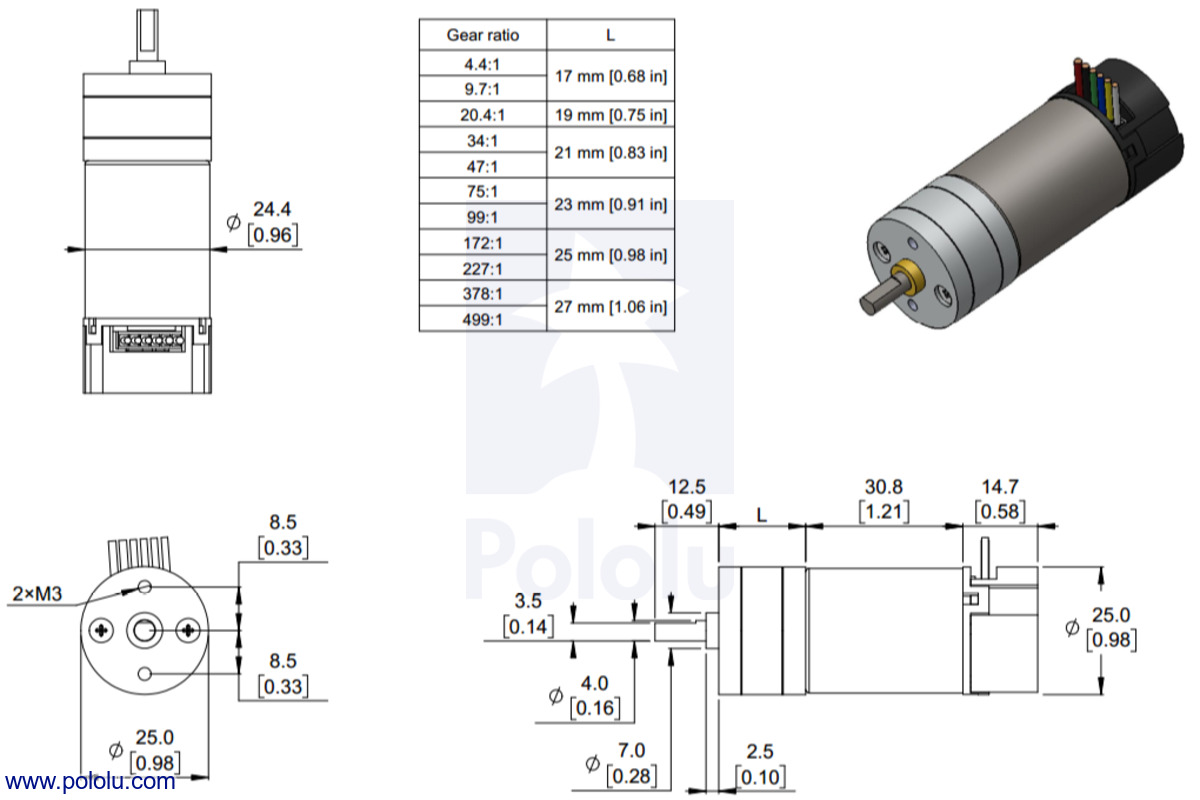
Dimensions
The diagram below shows the dimensions of the 25D mm line of gearmotors (units are mm over [inches]). This diagram is also available as a downloadable PDF (171k pdf).
 |
|
Dimensions of the Pololu 25D mm metal gearmotors with encoders. Units are mm over [inches]. |
|---|
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. We recommend screwing no further than 6 mm (0.24″) into the screw hole.
 |
|
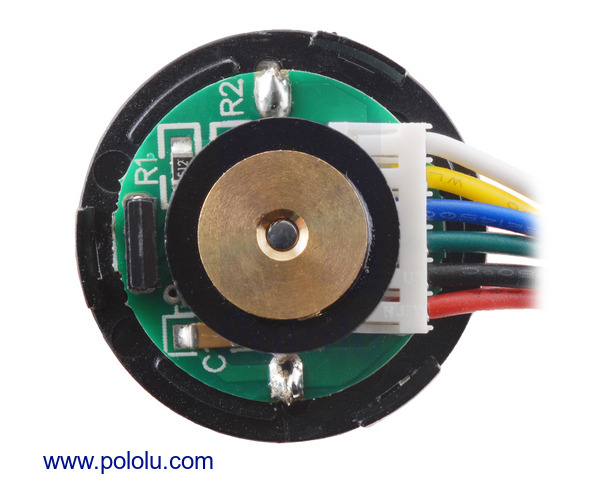
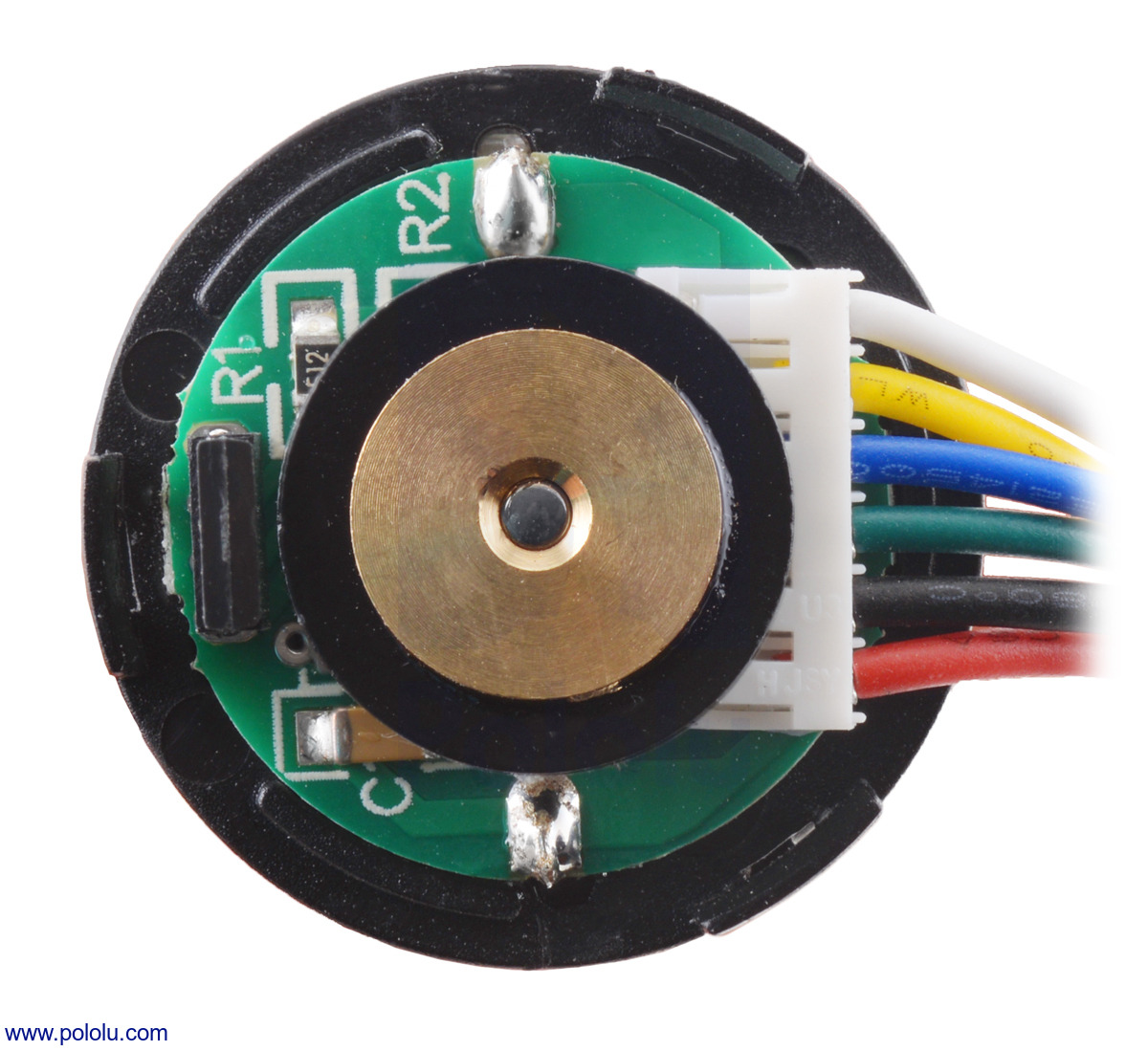
25D mm metal gearmotor with 48 CPR encoder (with end cap removed). |
|---|
 |
Using the encoder
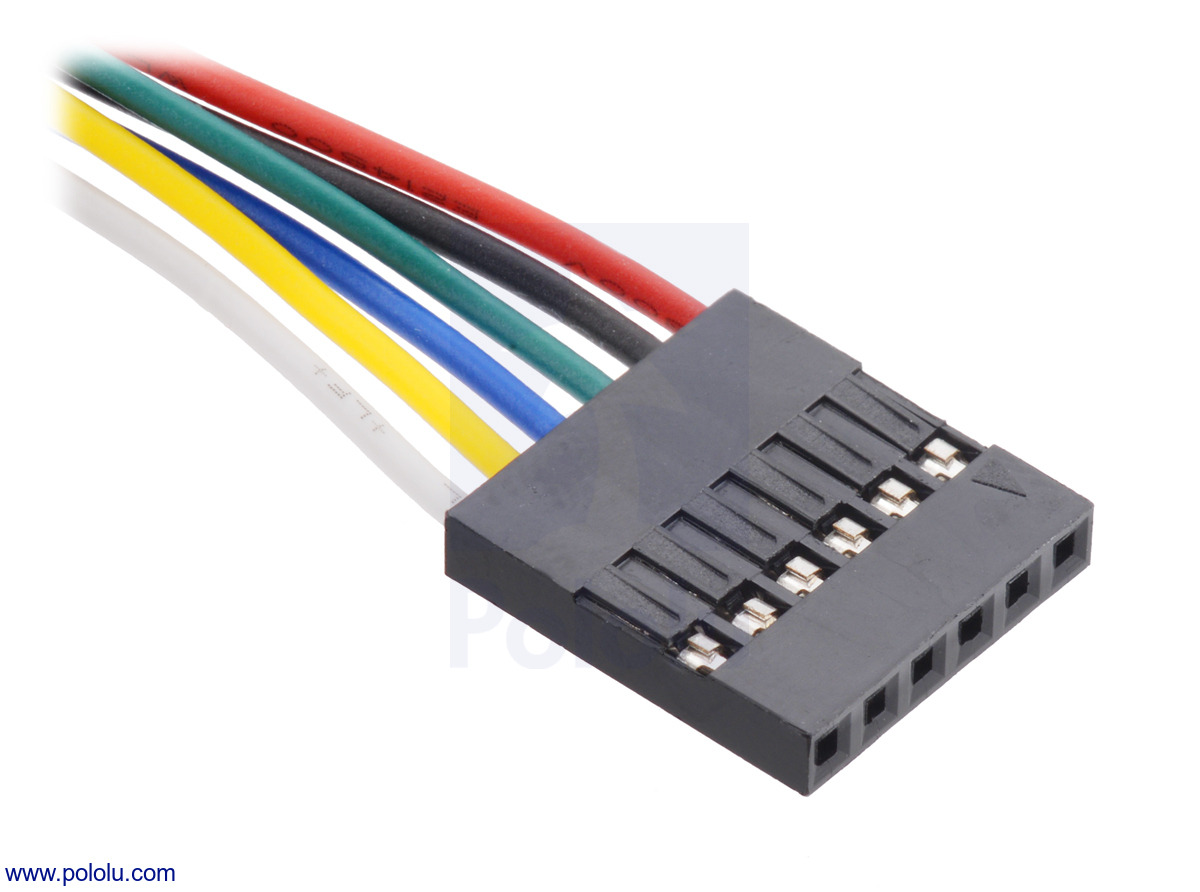
A two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 48 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output, multiply the gear ratio by 48. The motor/encoder has six color-coded, 8″ (20 cm) leads terminated by a 1×6 female header with a 0.1″ pitch, as shown in the main product picture. This header works with standard 0.1″ male headers and our male jumper and precrimped wires. If this header is not convenient for your application, you can pull the crimped wires out of the header or cut the header off. The following table describes the wire functions:
| Color | Function |
|---|---|
| Red | motor power (connects to one motor terminal) |
| Black | motor power (connects to the other motor terminal) |
| Green | encoder GND |
| Blue | encoder Vcc (3.5 V to 20 V) |
| Yellow | encoder A output |
| White | encoder B output |
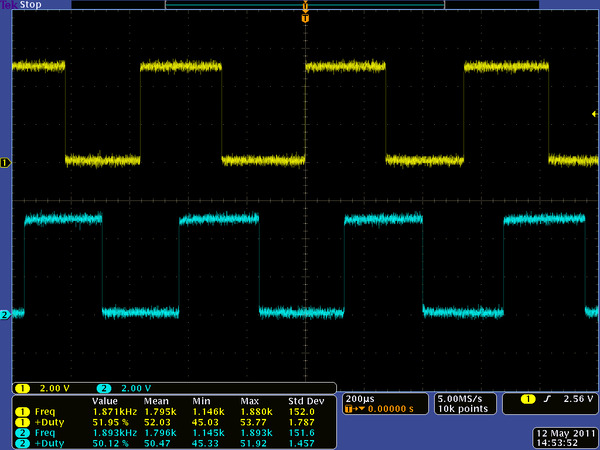
The Hall sensor requires an input voltage, Vcc, between 3.5 and 20 V and draws a maximum of 10 mA. The A and B outputs are square waves from 0 V to Vcc approximately 90° out of phase. The frequency of the transitions tells you the speed of the motor, and the order of the transitions tells you the direction. The following oscilloscope capture shows the A and B (yellow and white) encoder outputs using a motor voltage of 6 V and a Hall sensor Vcc of 5 V:
 |
|
Encoder A and B outputs for 25D mm HP 6V metal gearmotor with 48 CPR encoder (motor running at 6 V). |
|---|
By counting both the rising and falling edges of both the A and B outputs, it is possible to get 48 counts per revolution of the motor shaft. Using just a single edge of one channel results in 12 counts per revolution of the motor shaft, so the frequency of the A output in the above oscilloscope capture is 12 times the motor rotation frequency.
Dimensions
| Size: | 25D x 67L mm1 |
|---|---|
| Weight: | 101 g |
| Shaft diameter: | 4 mm2 |
General specifications
| Gear ratio: | 46.85:1 |
|---|---|
| No-load speed @ 12V: | 120 rpm3 |
| No-load current @ 12V: | 0.060 A4 |
| Stall current @ 12V: | 0.90 A5 |
| Stall torque @ 12V: | 4.8 kg·cm5 |
| Max output power @ 12V: | 1.4 W |
| No-load speed @ 6V: | 60 rpm6 |
| Stall current @ 6V: | 0.45 A6 |
| Stall torque @ 6V: | 2.4 kg·cm6 |
| Motor type: | 12V, 0.9A stall (LP 12V) |
Performance at maximum efficiency
| Max efficiency @ 12V: | 38 % |
|---|---|
| Speed at max efficiency: | 99 rpm |
| Torque at max efficiency: | 0.73 kg·cm |
| Current at max efficiency: | 0.16 A |
| Output power at max efficiency: | 0.74 W |
General specifications
| Lead length: | 8 in7 |
|---|---|
| Encoders?: | Y |
Notes:
- Length measurement is from gearbox face plate to back of encoder cap (it does not include the output shaft). See dimension diagram for details.
- D shaft.
- Typical; ±20%.
- Typical, ±50%; no-load current depends on internal friction, which is affected by many factors, including ambient temperature and duration of motor operation.
- Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
- This motor will run at 6 V but is intended for operation at 12 V.
- May vary by a few inches.