
 FREE DELIVERY FOR ORDERS ABOVE $100 ALL AROUND SINGAPORE!
FREE DELIVERY FOR ORDERS ABOVE $100 ALL AROUND SINGAPORE!
SHOP NOW
PRODUCTS

DC Motor Phidget
MODEL: DCC1000_0
SGD $ 141.00
Pre-Order
In Bulk
(per piece)
(per piece)
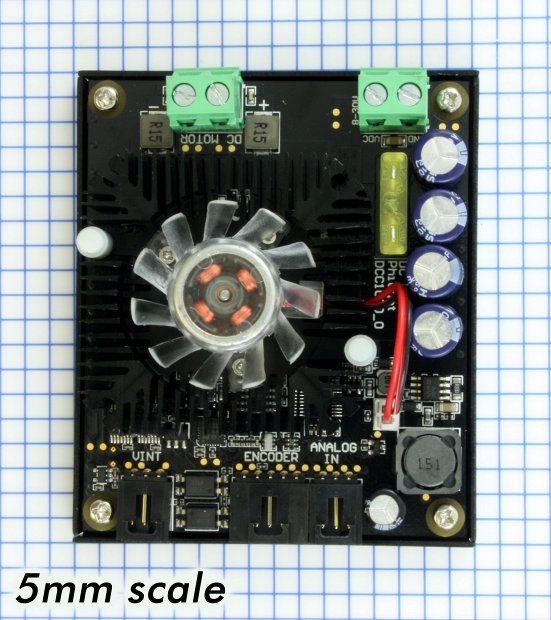
Control one high-current brushed DC motor with this powerful Phidget. The encoder input and analog input can enable precise control motor velocity and position.
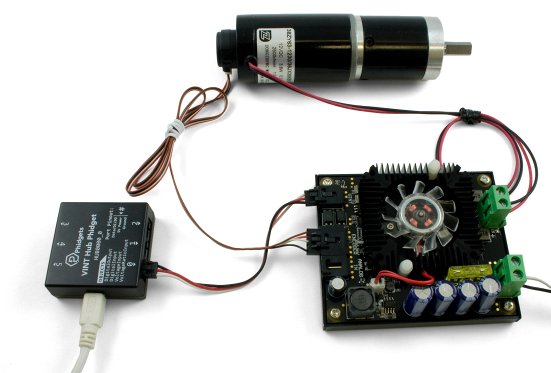
The DC Motor Phidget allows you to control a single DC motor (up to 25 A) or DC linear actuator. It uses high-frequency pulse-width modulation to achieve smooth operation. This Phidget connects to your computer through a VINT Hub.
Features:
- Control velocity and acceleration - Forward and reverse
- Set a specific target position (requires an encoder)
- Monitor electrical current - Detect motor stalling
- Attach potentiometers and other ratiometric sensors - Incorporate position feedback without needing a separate input board
- Encoder input - Read in the quadrature signal from an encoder attached to the shaft of your motor. This lets you make a closed-loop position controller.
- Monitor Temperature - Your program can react to changes in controller temperature.
Technical Details:
- Current Control - Limit the motor torque
- Isolation - The VINT port on this device is isolated, improving reliability and eliminating ground loops
- Polarity Protection - The device will not turn on and will not be damaged if the power supply is connected backward
- Overcurrent protection - On-board fuse to protect the controller in an over-current event
- Failsafe Protection - Set the device to turn off automatically if your program becomes unresponsive
Product Specifications
| Board Properties | |
|---|---|
| Controlled By | VINT |
| Voltage Sensor | |
| Number of Voltage Inputs | 1 |
| Sampling Interval Min | 500 ms/sample |
| Sampling Interval Max | 60 s/sample |
| VoltageRatio Input Resolution | 0.00026 |
| Input Voltage Min (DC) | 0 V DC |
| Input Voltage Max (DC) | 5 V DC |
| Measurement Error Max | 0.5 % |
| Sensor Input Impedance | 324 kΩ |
| Controller Properties | |
| Motor Type | DC Motor |
| Number of Motor Ports | 1 |
| Velocity Resolution | 0.001 Duty Cycle |
| Acceleration Resolution | 1 % Duty Cycle/s |
| Acceleration Min | 0.5 % Duty Cycle/s |
| Acceleration Max | 10000 % Duty Cycle/s |
| Acceleration Time Min | 20 ms |
| Acceleration Time Max | 20 s |
| PWM Frequency | 25 kHz |
| Sampling Interval Min | 50 ms/sample |
| Sampling Interval Max | 60 s/sample |
| Current Limit Resolution | 17.9 mA |
| Electrical Properties | |
| Continuous Motor Current Max | 25 A |
| Supply Voltage Min | 8 V DC |
| Supply Voltage Max | 30 V DC |
| Current Consumption (Unconfigured) | (VINT Port) 500 μA |
| Current Consumption Max | (VINT Port) 2 mA |
| Power Consumption (Unconfigured) | 288 mW |
| Power Consumption | motor power plus 700 mW |
| Replacement Fuse | 20A Slow Blow Blade Type, Regular or Micro |
| Encoder Interface | |
| Number of Encoder Inputs | 1 |
| Encoder Interface Resolution | x4 |
| Count Rate Max | 400000 pulses/s |
| Time Resolution | 1 μs |
| Sampling Interval Min | 50 ms/sample |
| Sampling Interval Max | 60 s/sample |
| Encoder Input Low Voltage Max | 800 mV DC |
| Encoder Input High Voltage Min | 2 V DC |
| Temperature Sensor | |
| Temperature Resolution | 0.04 °C |
| Physical Properties | |
| Recommended Wire Size | 10 - 26 AWG |
| Operating Temperature Min | -40 °C |
| Operating Temperature Max | 85 °C |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |